
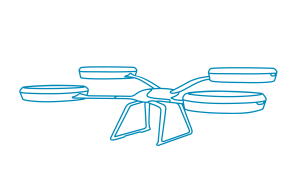
Mode 1
Configuration: The Drone is autonomous and can operate without payload (Cabin)
Operation (eg): Moving to the charging station
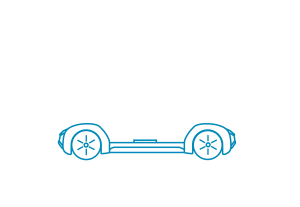
Mode 2
Configuration: Skate is autonomous and can operate without payload (Cabin)
Operation (eg): Moving to the charging station
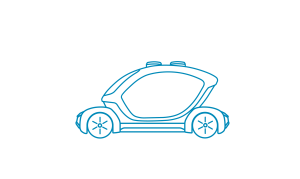
Mode 3
Configuration: Skate + Cabin, with autonomous operation
Operation (eg): Used for horizontal mobility
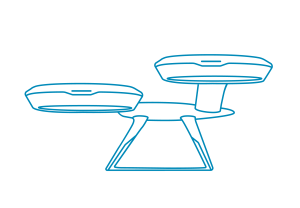
Mode 4
Configuration: Drone + Cabin, with autonomous operation
Operation (eg): Used for vertical mobility

